Current Projects (2023~Current):
Hydro-Softening
Past Projects (2020~2022):

IEEE EMBC 2021
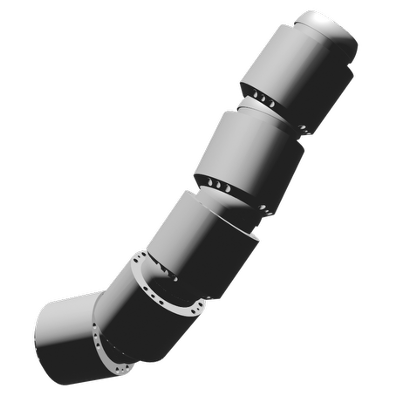
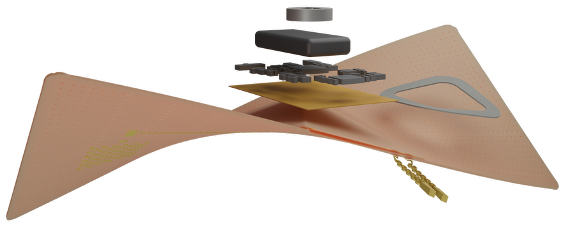
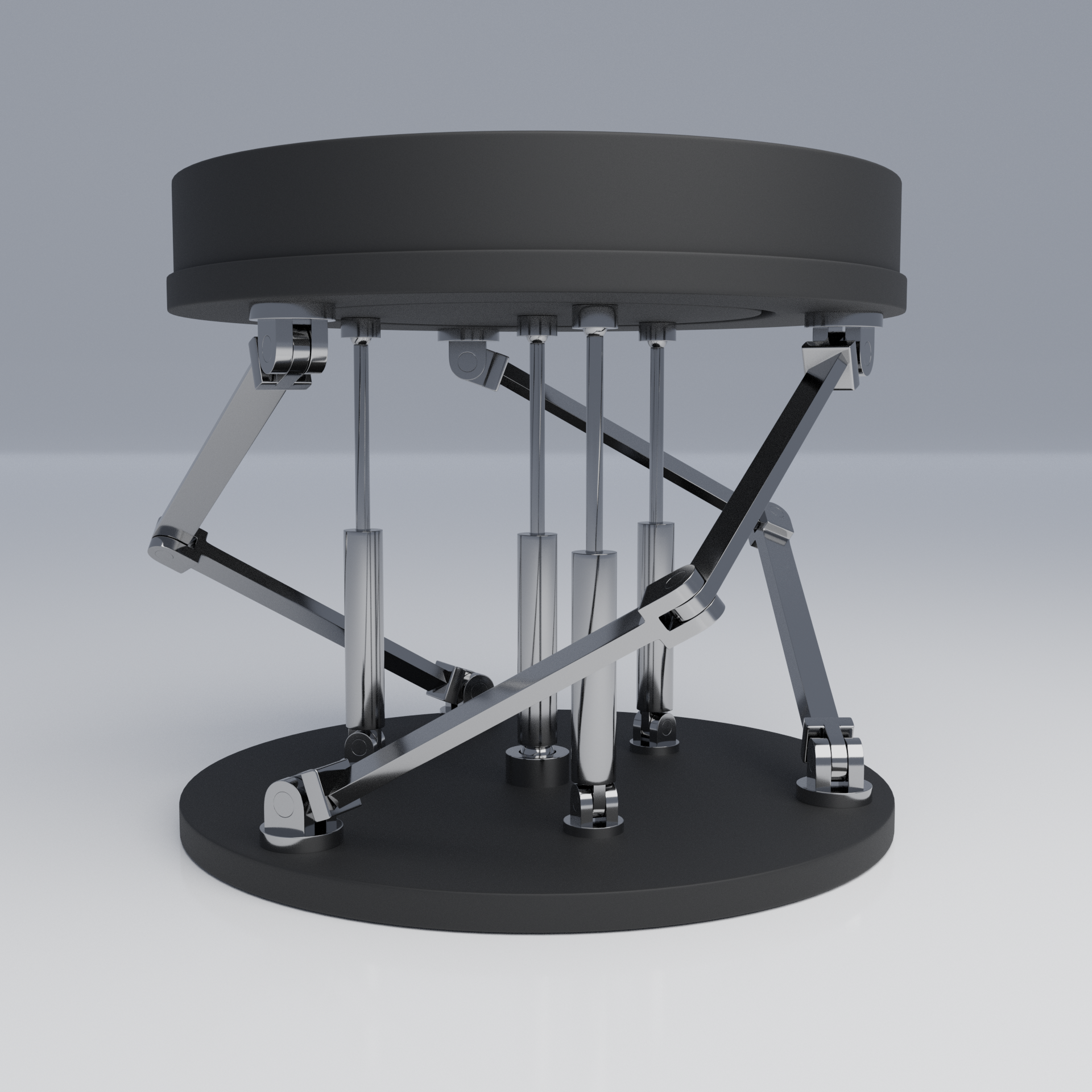
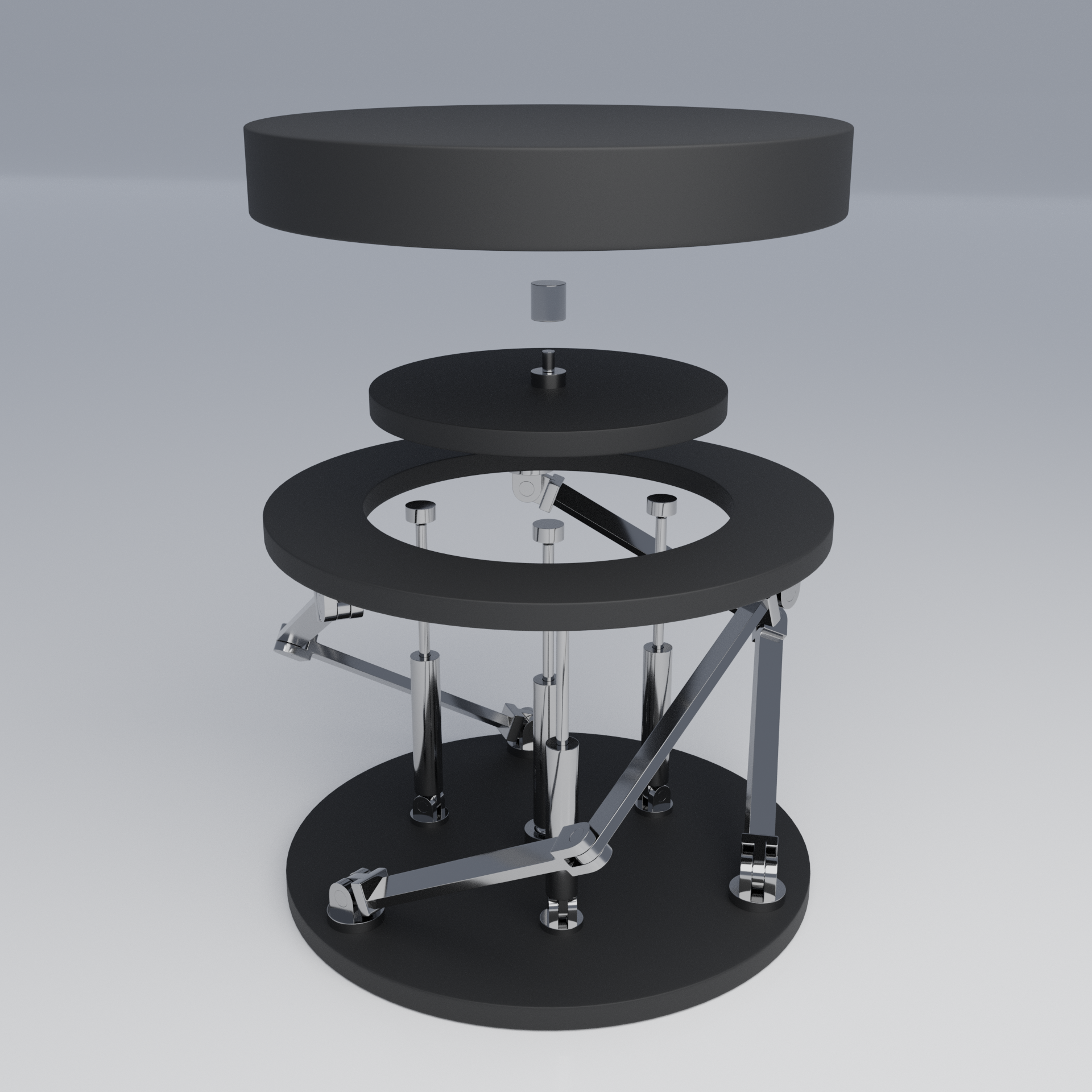
This project introduces a parallel mechanism for upper-limb prosthetic wrists. Our offset Kresling-origami-inspired structure generates rotational wrist motion passively, reducing the number of actuators.
In this work, we employed screw theory to derive both its forward and inverse kinematics. The system achieves quasi-spherical mobility while remaining lightweight and tendon-driven, ideal for amputees with trans-radial loss.
This work was done under Prof. Woon-Hong Yeo’s supervision as part of the I2P coursework during my 2nd year as an undergraduate student.
For more information, please refer to our peer-reviewed proceedings article.
ACS Applied Electronic Materials 2022
Under Prof. Woon-Hong Yeo’s supervision, I worked on various flexible and stretchable sensing systems for physiological monitoring. These projects include intracranial pressure sensing system, sweat-and-microfluidics-based ion selective sensing system, and wearable electromyogram (EMG) system.
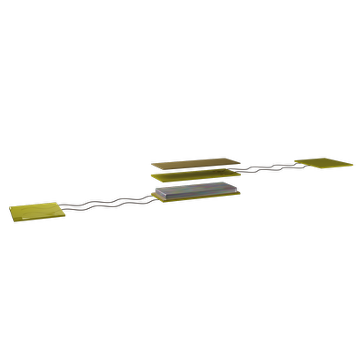
In this highlighted work, we developed a flexible two-lead ECG sensing system, incorporating a breathable elastomer, designed for extended wear.
For more information, please refer to our article.
A Bio-Inspired Platform for Soft Materials

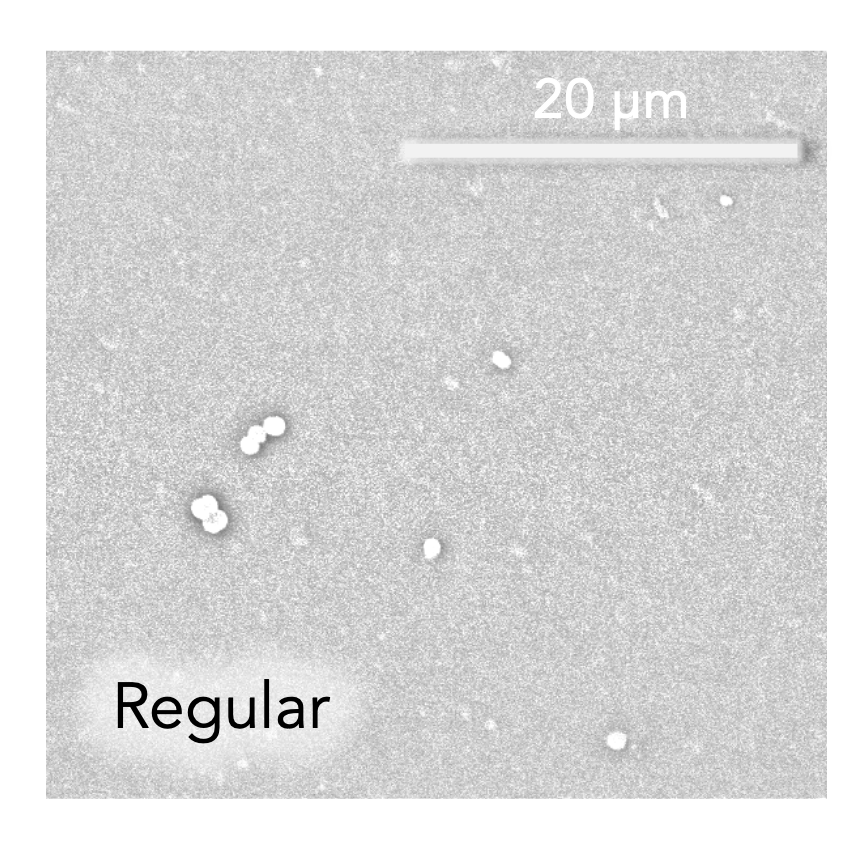
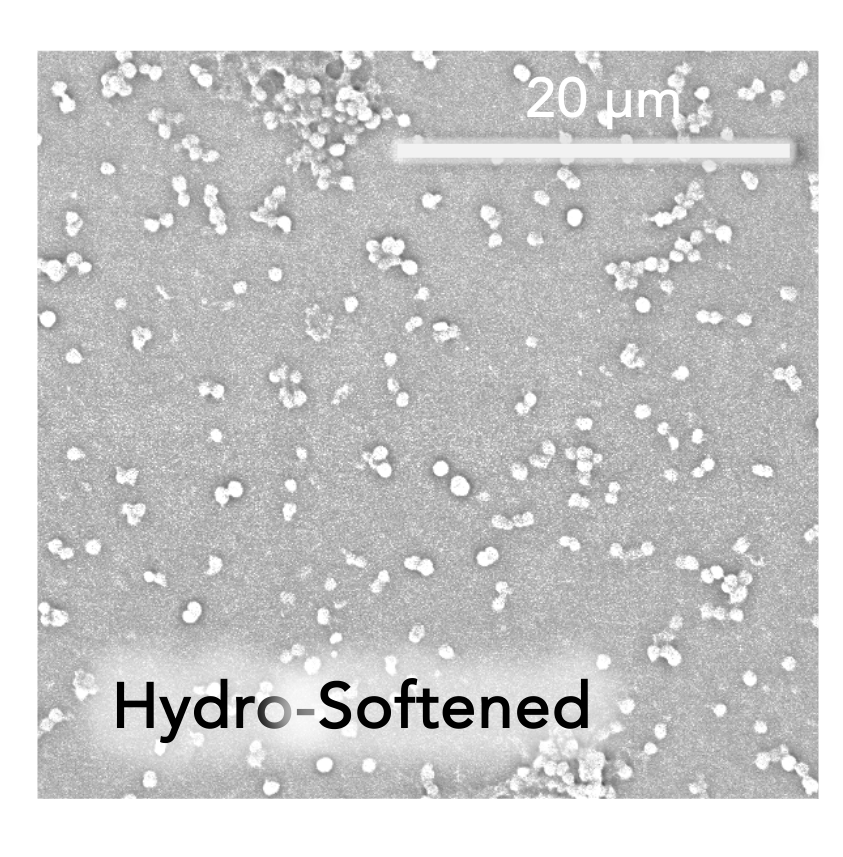
Mornings often begin with routine comforts — a hot shower, perhaps a cup of coffee, and for many, a few steps of skincare. Hydrated skin, soft and supple to the touch, is often the goal. But what gives hydrated skin its characteristic softness? After all, hydration doesn’t mean the skin is wet. So where is the water, and how does it behave within the tissue? These questions point to the deeper material properties of mammalian skin — a naturally soft yet mechanically resilient structure. The concept of hydro-softening draws direct inspiration from this hydration-mediated softening mechanism.
Under the supervision of Prof. Tequila A. L. Harris and in collaboration with Prof. Julie A. Champion’s research group, we investigated the biological implications of hydro-softening applied to chitosan. Our work was guided by a simple hypothesis: that nanoscale alterations in the material properties of hydro-softened chitosan are sufficient to modulate its interfacial characteristics and influence cell interactions.
It turns out that hydro-softening does, in fact, enhance cell adhesion. This enhancement arises from hydro-softening’s ability to induce both global and localized reductions in stiffness and surface energy without any chemical modification. By physically confining interfacial water, we demonstrate a passive, tunable, and spatially heterogeneous strategy for modulating interfacial bioactivity.
For more information, please find our article on ACS Macro Letters (Open Access).